The diagram below outlines a technical maturity model for telcos looking to move towards autonomy.
It provides a visual representation of the stages:
In the diagram, the words in blue and the yellow speech bubbles briefly describe the main new technologies used at each stage.
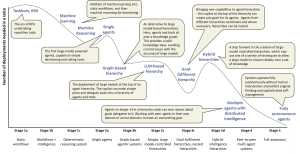
Stage 1a: Static workflows
Individual scripts and RPA taskbots undertake repetitive tasks using predefined rules. Steps are executed in a fixed order, often triggered manually or by simple events. Included here are customer- or employee-facing chatbots using Natural Language Processing (NLP), but not yet large model, to respond to user inputs
Stage 1b: Workflows + intelligence
Machine learning and advanced analytics augment predefined workflows with intelligent insights, but execution paths remain fixed and human-defined; included are customer- or employee-facing NLP-based chatbots that respond to inputs without large-model reasoning
Stage 1c: Deterministic reasoning system
Systems use machine reasoning or symbolic inference (e.g. decision trees, rule engines, constraint-based logic) to make decisions within strict, predefined decision paths; a reasoning engine may invoke other ML models to generate candidate solutions over which it can reason
Stage 2a: Single agents
A large model accepts requests and performs tasks, including generative AI activities such as content creation; it can reason, make decisions, and invoke tools via APIs, but operates independently from other agents in the environment
Stage 2b: Graph-based agentic systems
A range of agents, including a copilot, sit on top of a knowledge graph and reasoning engine; they issue structured queries to the reasoning engine and receive validated answers, offering a more reliable alternative to the inference of a large model, but reducing the ability of the system to adapt to change
Stage 2c: Simple, large model-controlled hierarchies
The copilot sits at the top of an agent hierarchy, receiving user intent and delegating actions to agents and tools beneath it. The agents or tools invoked undertake specific tasks and return results to the copilot or other systems, as requested
Stage 3a: Goal-fulfilment hierarchies, nested hierarchies
The copilot decomposes user intent into goals, assigns them to agents, and takes responsibility for successful task completion. It can modify workflows and select or create agents as needed to complete the task. Cross-hierarchical interactions are also more common here, with agents from different hierarchies coordinating actions without a single central controller. Nested hierarchies describe a structure in which agents can assign goals to subordinate agents, which may in turn delegate further, creating layered chains of execution
Stage 3b: Hybrid-intelligence hierarchies
To date, agent systems have had to choose between controlling their agent hierarchies with graphs or large models augmented with guardrails and validation models to maintain accuracy. The emergence of hybrid intelligence enables large models to be grounded in symbolic, deterministic reasoning – a range of options are likely to be available
Stage 4: Peer-to-peer multi-agent systems
Agents are no longer hierarchically organized and can independently reason about goal fulfillment while coordinating with peer agents within and across domains; a copilot still interprets intent but now focuses on strategic direction, including defining objectives and enabling agent group formation
Stage 5: Full autonomy
Agents operate fully autonomously without human intervention, exhibiting original reasoning, generating their own goals and strategies, and solving problems not envisioned during initial training